- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Contact Information
University: Tsinghua University
Team Members (with year of graduation): He Jiarui, Stasinopoulos Sotirios, Yu Yongchao, Xu Kaiyuan, Chen Kai
Faculty Advisers: Zhao Mingguo
Email Address: hjr13@mails.tsinghua.edu.cn
Submission Language: English
Project Information
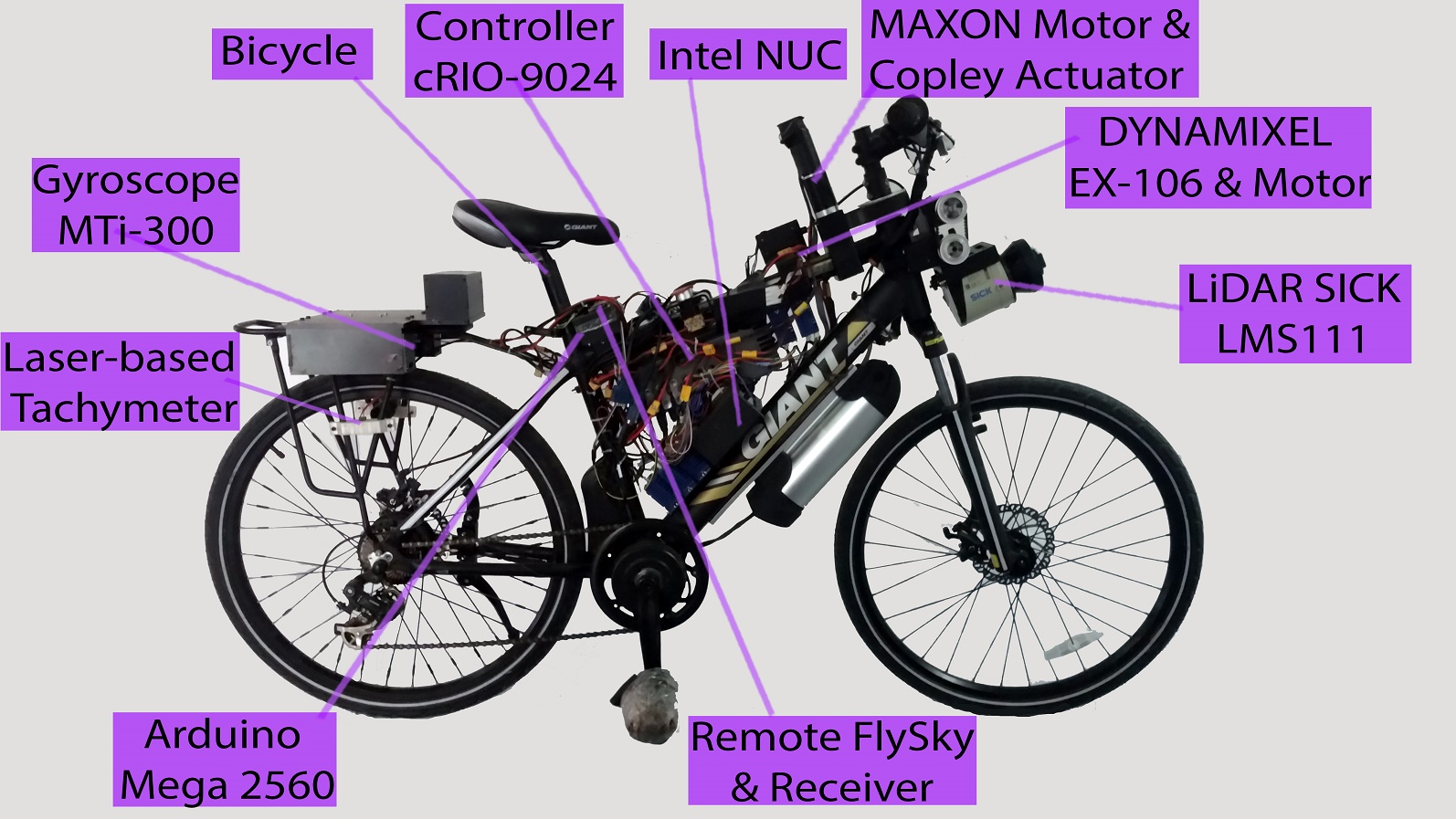
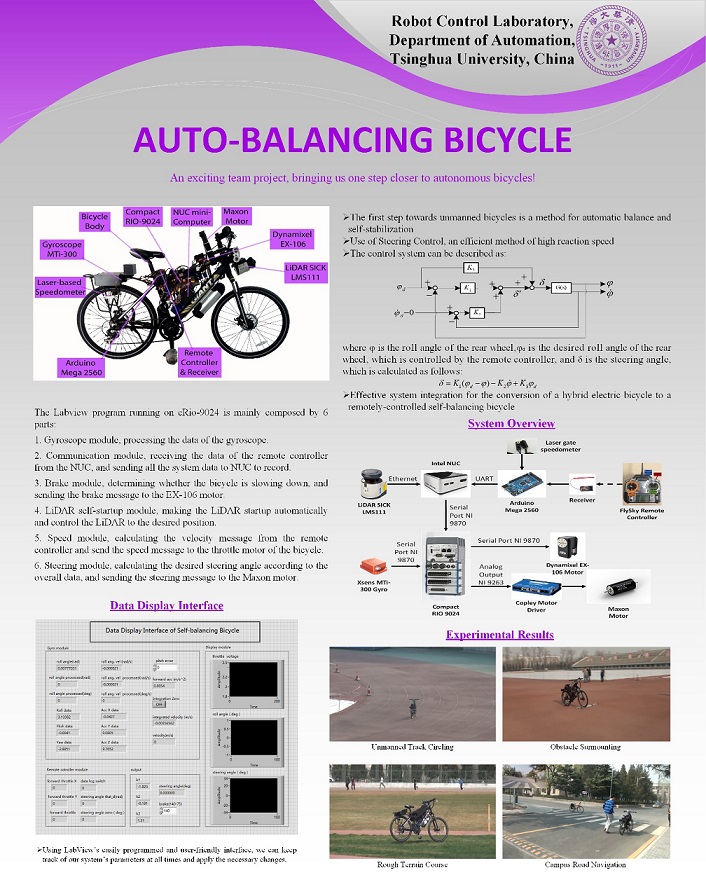
Title: Auto-balancing Bicycle
Description: The auto-balancing bicycle is modified from a hybrid electric bicycle. Using the steering control method, it can go forward, turn left and right flexibly at different velocities, providing a platform for unmanned bicycles.
Video Links:http://youtu.be/G3ntcx6ywS4
Products:
Hardware:
NI cRIO 9024
NI 9114 Module
NI 9263
NI 9870
NI 9403
Software:
NI LabVIEW 2011
LabVIEW Real-Time Module 2011
NI RIO 2011
Other Hardware and software:
An electric bicycle
Inter NUC
Arduino Mega 2560
Maxon motors & Copley drivers
Xsens MTi-300 gyroscope
LiDAR SICK
Laser-based speedometer
Dynamixel EX-106 motor
Remote controller
Software:
ROS
The Challenge:
The bicycle, as a widely used vehicle, and its driverless technology has become a research hotspot in recent years. Compared to driverless automobiles, bicycles have more flexibility due to their small size and more difficulties due to their two-wheel structure. Bicycles will fall down without any control, while automobiles don’t have this problem. Therefore, the major challenge faced by driverless bicycles is designing a control system to make the bicycle remain balanced and achieve flexible steering.
The dynamics of the bicycle is a complex nonlinear system, while the parameters of bicycles are difficult to obtain accurately and the disturbance of the environment is unknown. Thus, the control system we designed needs to be robust and stable enough to resist those internal and external disturbances.
The Solution:
 System Overview:
System Overview:
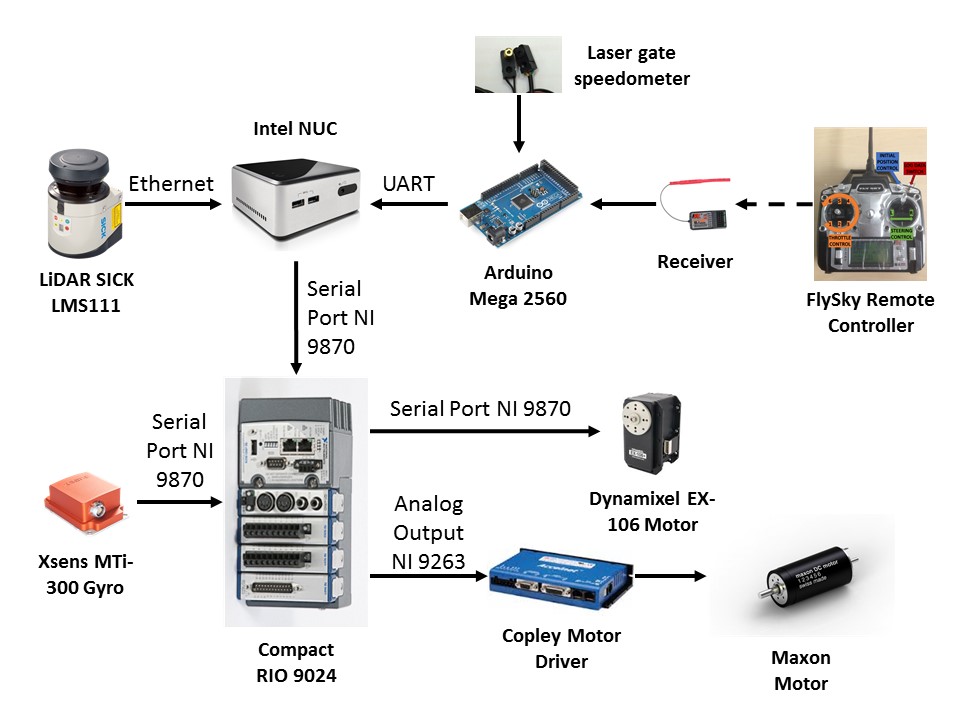
For more information regarding the detailed bicycle dynamics model, control system and software-hardware descriptions, look at the attached document "Auto-Balancing Bicycle Technical Report".
Attach Poster:
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
pretty cool !!!
