From 04:00 PM CDT – 08:00 PM CDT (09:00 PM UTC – 01:00 AM UTC) Tuesday, April 16, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
From 04:00 PM CDT – 08:00 PM CDT (09:00 PM UTC – 01:00 AM UTC) Tuesday, April 16, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
Hello,
I am attaching an application (with graphical user interface - GUI) that can be used to register/align a pair of point clouds. Filtering can also be performed prior to the registration process. The application is partially inspired by Geomagic's cloud registration functionality (although my interface is not nearly as fancy  ). There are three registration possibilities:
). There are three registration possibilities:
Figure 1 shows the main user interface with two triangulated point clouds that need to be registered.
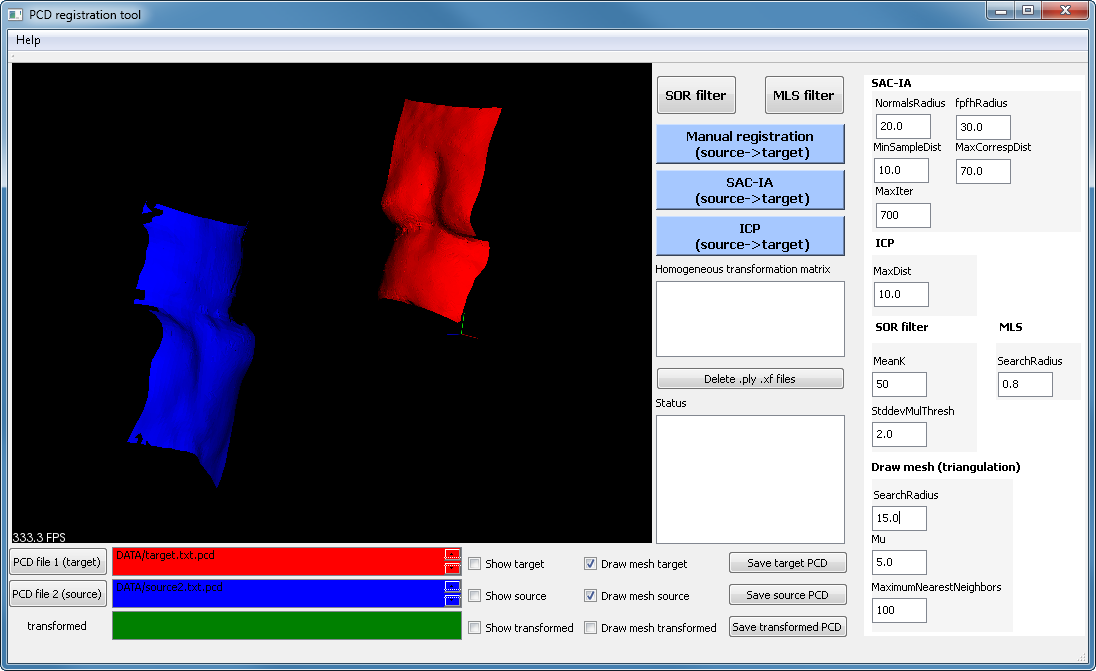
Figure 1. Main window of the application.
Clouds from Figure 1 cannot be aligned with ICP directly, so some preprocessing is necessary. Figure 2 shows the user interface for manual registration. The transformed cloud based on the manual registration and target cloud are shown at the bottom of the interface.
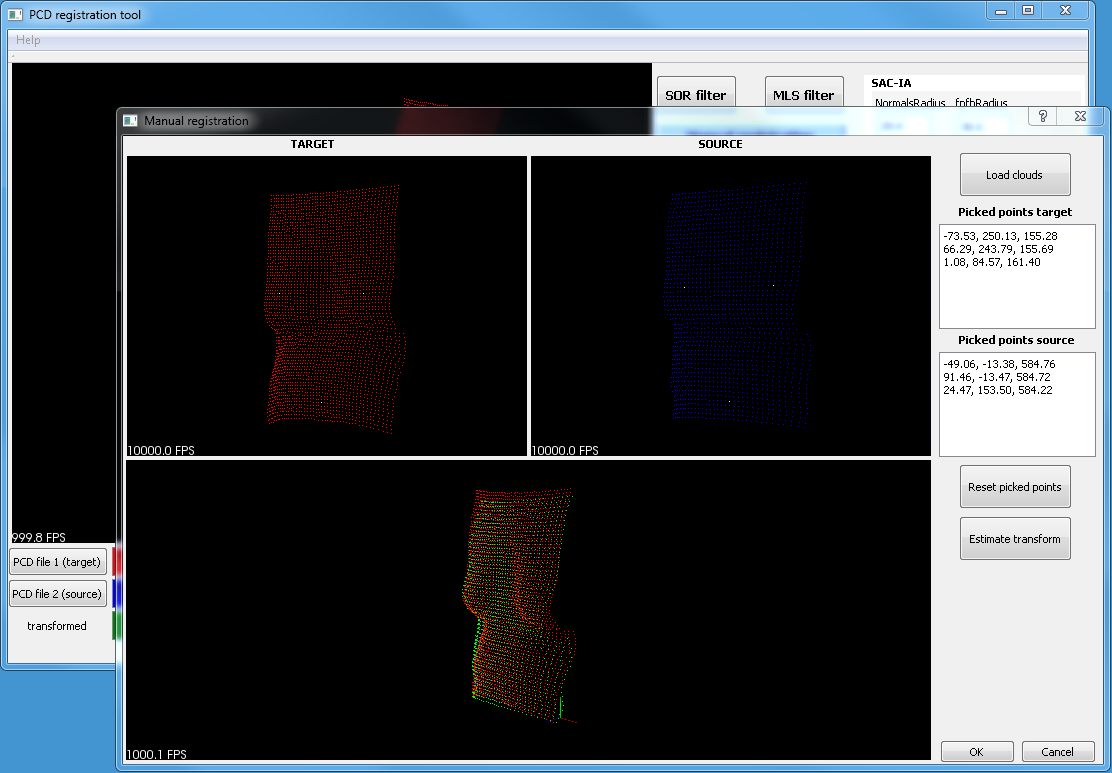
Figure 2. Interface for manual registration.
By selecting "OK", the transformation values are passed to the main window and the transformation matrix indicator is updated accordingly (see Figure 3).
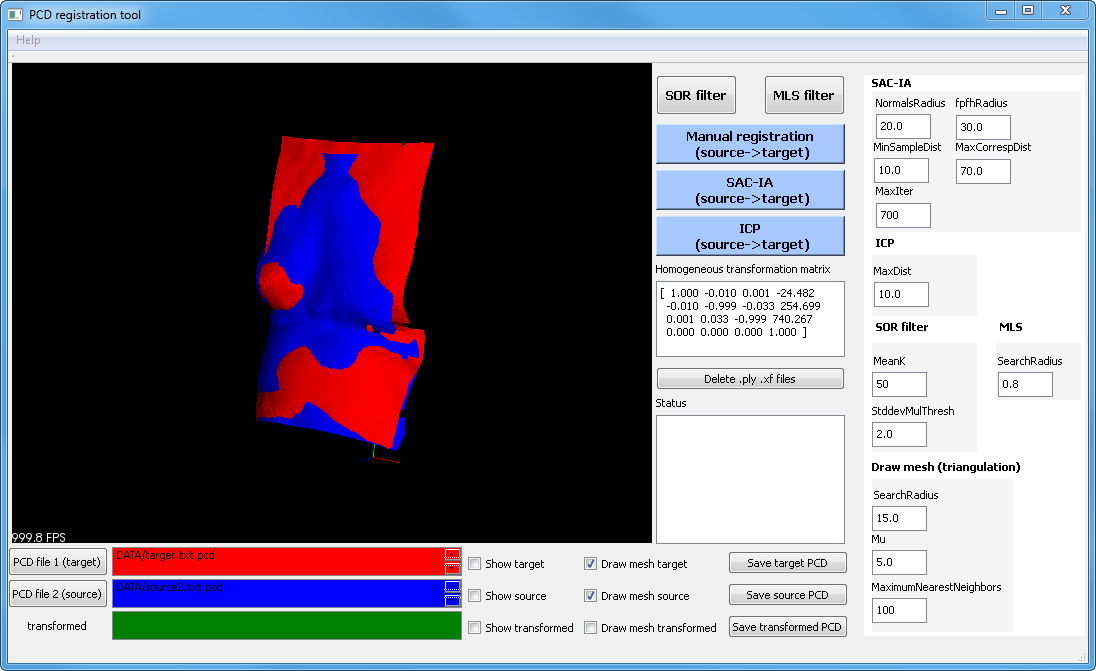
Figure 3. Manual registration.
Performing the ICP improves the result by minimizing the errors and the transformation matrix indicator gets updated (see Figure 4). Multiple ICP routines can be executed by clicking on the ICP button.
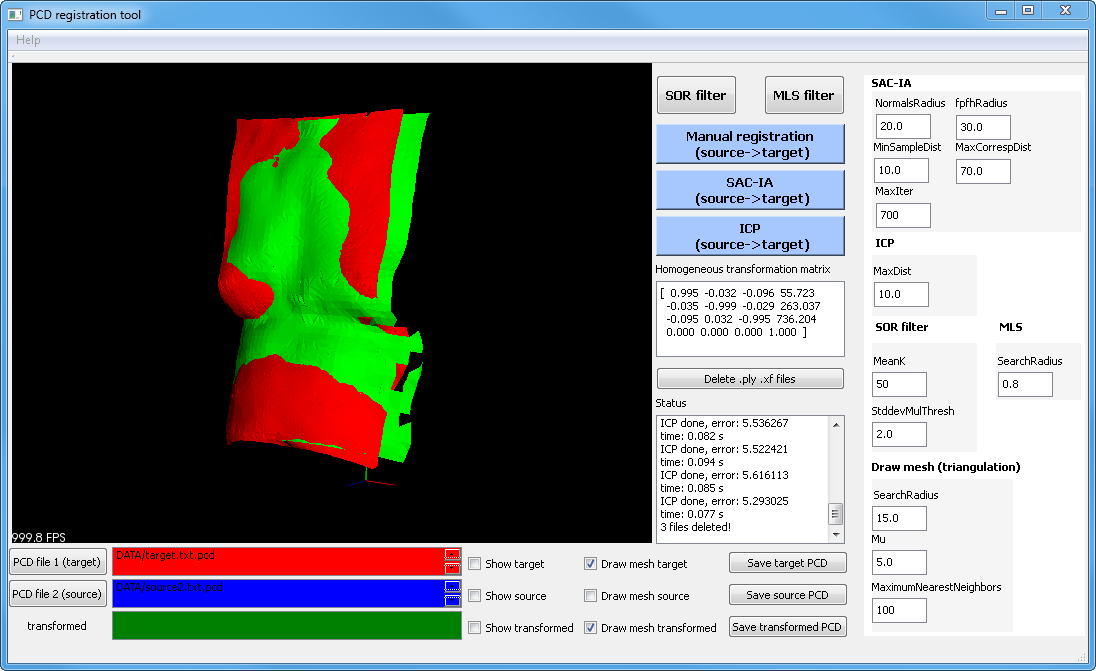
Figure 4. ICP registration.
In every step, the clouds can be visualized in main window as points (see Figure 5) or surfaces (see Figures 1,3,4).
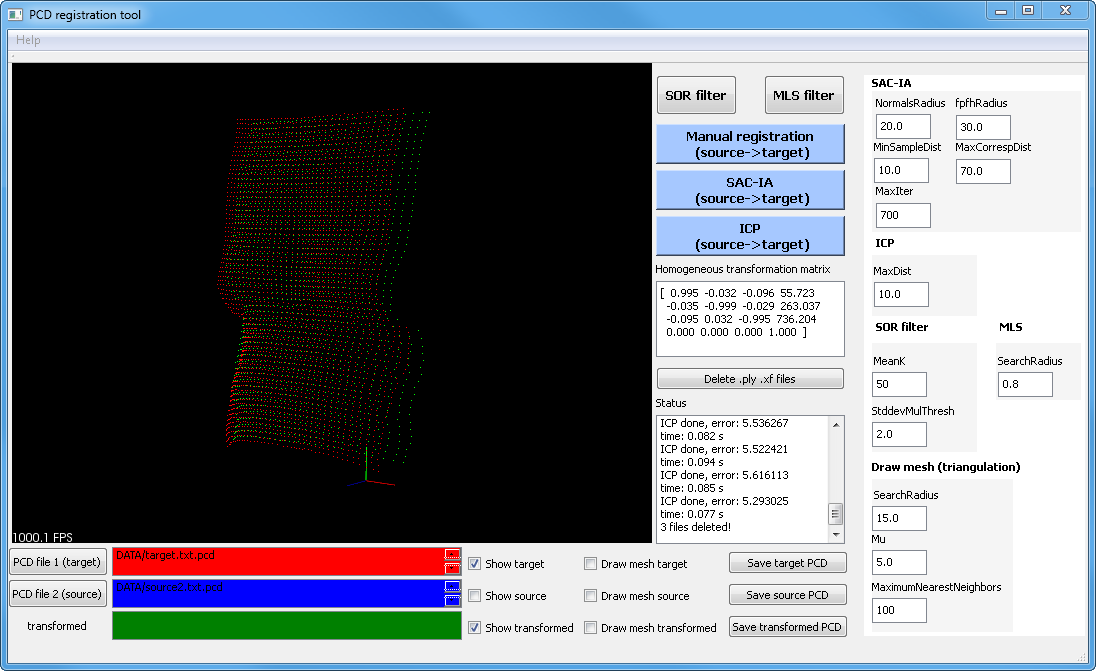
Figure 5. Data from figure 4 visualized as points.
Additional information on the controls and indicators can be found by clicking on the Help->Instructions on the top-left corner of the GUI (see Figure 6).

The requirements to run the application are PCL 1.6.0 and Qt 4.8.0, where you need to add the "bin" paths to the PATH system variables.
The application is at this time provided as .exe only and can be found in the attached .zip file. The .zip file is password protected in order to potentially avoid the virus scanning during upload. The password is in the attached .txt file.
There are possibly some bugs - if you test the application and have the time, please provide feedback.One of the bugs is related to the manual registration only after re-opening the manual registration window. The picked points are not always displayed on the cloud, although they are registered (see the cmd output window).
P.S.: The input cloud(s) must be in the .pcd format. Example (column 1 - X data, column 2 - Y data, column 3 - Z data):
# .PCD v0.7 - Point Cloud Data file format
VERSION 0.7
FIELDS x y z
SIZE 4 4 4
TYPE F F F
COUNT 1 1 1
WIDTH 3171
HEIGHT 1
VIEWPOINT 0 0 0 1 0 0 0
POINTS 3171
DATA ascii
10.000000 25.000000 -5.000000
11.000000 26.000000 -4.000000
14.000000 29.000000 -1.000000
-112.290000 164.349000 82.436000
-111.669000 159.135000 85.179000
-110.629000 154.515000 91.104000
... ... ...
Best regards,
K
You must be a registered user to add a comment. If you've already registered, sign in. Otherwise, register and sign in.
