- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Contact Information
Competition Year: 2016
University: Warsaw University of Technology
Team Members (with year of graduation): Michał Gulczyński (2017), Marcin Maćkowiak (2016)
Faculty Advisers: Dr inz. Sławomir Paśko
Email Address: michal.gulczynski93@gmail.com
Submission Language: English
Project Information
Title: Demonstration System Based on Diffuse Optical Tomography
Description: The project is a low-cost system which performs measurements based on imaging technique called Diffuse Optical Tomography.
Products:
Hardware:
- NI USB-6221
- Arduino Uno
- Step motors and drivers
- 1mW red Laser (628 nm)
- Thorlabs PDA36A-EC
Software:
- NI LabVIEW 2012
- MATLAB 2012
- TOAST+
- LabVIEW Inteface for Arduino
The Challenge:
Diffuse optical tomography is an emerging medical technique in which biological material is illuminated by near-infrared light from array of sources. The light scattered by the tissue emerges and is observed with an array of detectors around the object. By using acquired measurements and specified model of the light propagation in sample distribution of optical properties in tissue is inferred. Imaging in diffuse optical tomography requires expensive and specialized equipment. To conduct measurements an array of light sources and an array of detectors are necessary.
The major difficulty of this project was the necessity of having multiple light sources and detectors. Proper simulation was required to minimize cost of the system.
The Solution:
The System consists of a data acquisition device NI-USB 6221, detector Thorlabs (PDA36A-EC), two step motors controlled by Arduino Uno and proper step motor drivers. To analyze data, perform calculations and create image reconstructions MATLAB library called TOAST++ was used.
The author decided to use one laser light source of 628 nm wavelength and one Thorlabs detector. Light source was still, detector was set on a pylon which was connected to a turntable. The turntable was placed coaxially with the measured sample. Detector was revolving around a sample and in specific places intensity of light emerged from sample was measured. Detector's movement replaced multiple still detectors. It was connected to data acquisition device NI-USB 6221 through BNC cable.
The sample was immersed in a vessel filled with mixture of milk and water. The reason to use mixture was to simulate biological tissue which is very turbid. Cylindrical objects were put in vessel then measurement was perform. By analyzing an image reconstruction location of the object was verified. The vessel was placed on a base connected coaxially to step motor shaft. Thus the sample could rotate around its own axis. The reason for that was to simulate distribution of multiple light sources around the sample. Components used in system are presented on fig. 2

Fig. 1. Example of light propagation in turbid media.
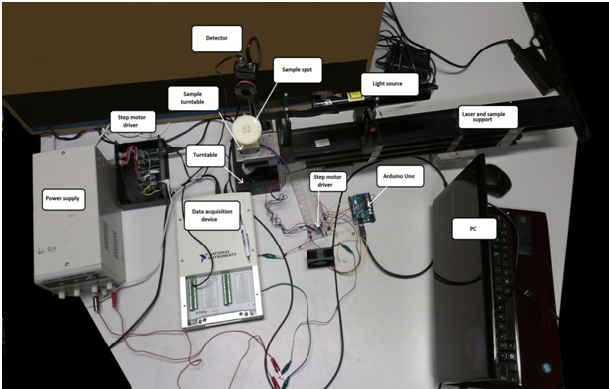
Fig. 2. Actual demonstration system
Data acquisition and movement of motors were controlled by application created in LabVIEW 2012. The software was founded on Simple State Machine design pattern. Therefore code sections responsible for motor movement, data acquisition and saving as well as initialization of the devices were divided into states. All of the states were connected in special sequence with the decision-making logic that determines when to move to a particular state. Established measurement procedure covers execution of ten measurements in specified places around sample. Then detector returns to starting position and the sample rotates by specific angle. Data acquisition ends when sample rotates by 360 degrees. Next gathered data is processed and send to the reconstruction algorithm. Measurement procedure is presented on diagram on fig. 3.
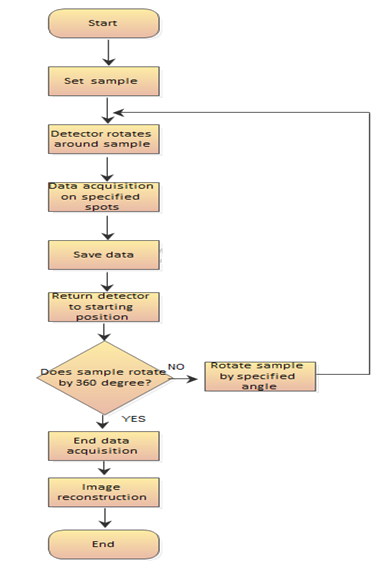
Fig. 3. Measurement procedure
Using NI-USB 6221 and DAQmx functions allowed to easily acquire different voltage values form detector at specified positions around the sample and save this gathered data in a proper manner. LabVIEW Interface for Arduino and VISA Serial Port functions pallet enabled the effortless control of the two step motors used in project. Simple State Machine template allowed to correlate movements of detector and sample with data acquisition which was the most fragile part of the project.
Total time taken on this project was around 4 months yet there is a lot of further work. Presently system allows to perform basic measurements of object in a vessel with some inaccuracy.
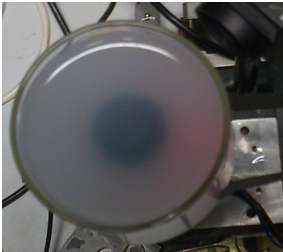
Fig. 4. Tested sample
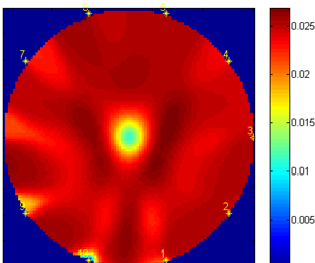
Fig. 5. Image reconstruction
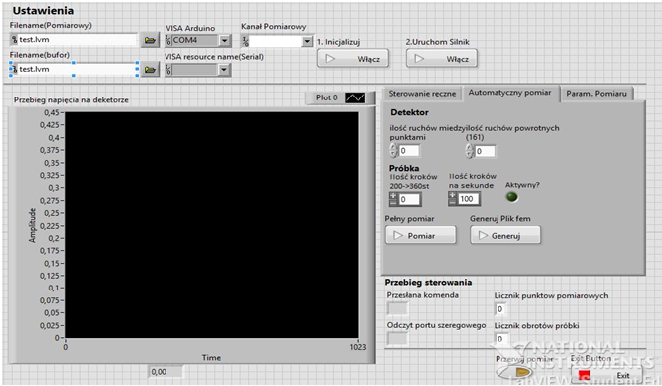
Fig. 6. Front Panel of the application
