in the schematic editor, the two servos we have connected work perfectly fine. In the remote control editor, for one the buttons, we chose the action "move to position", selected one of the servos, and set a certain position for it, then generated the code for it. If we run the prototype from the remote control editor, the servos respond perfectly good according to the position set and everything. However, when we run the teleop (without making any changes to the code generated) the NXT automatically exits the program and displays "file error".
We have tested out other programs that dont include the code for the servo, and work perfectly fine. The error comes up just when the servos are added into the teleop code. Any Help to fix that?
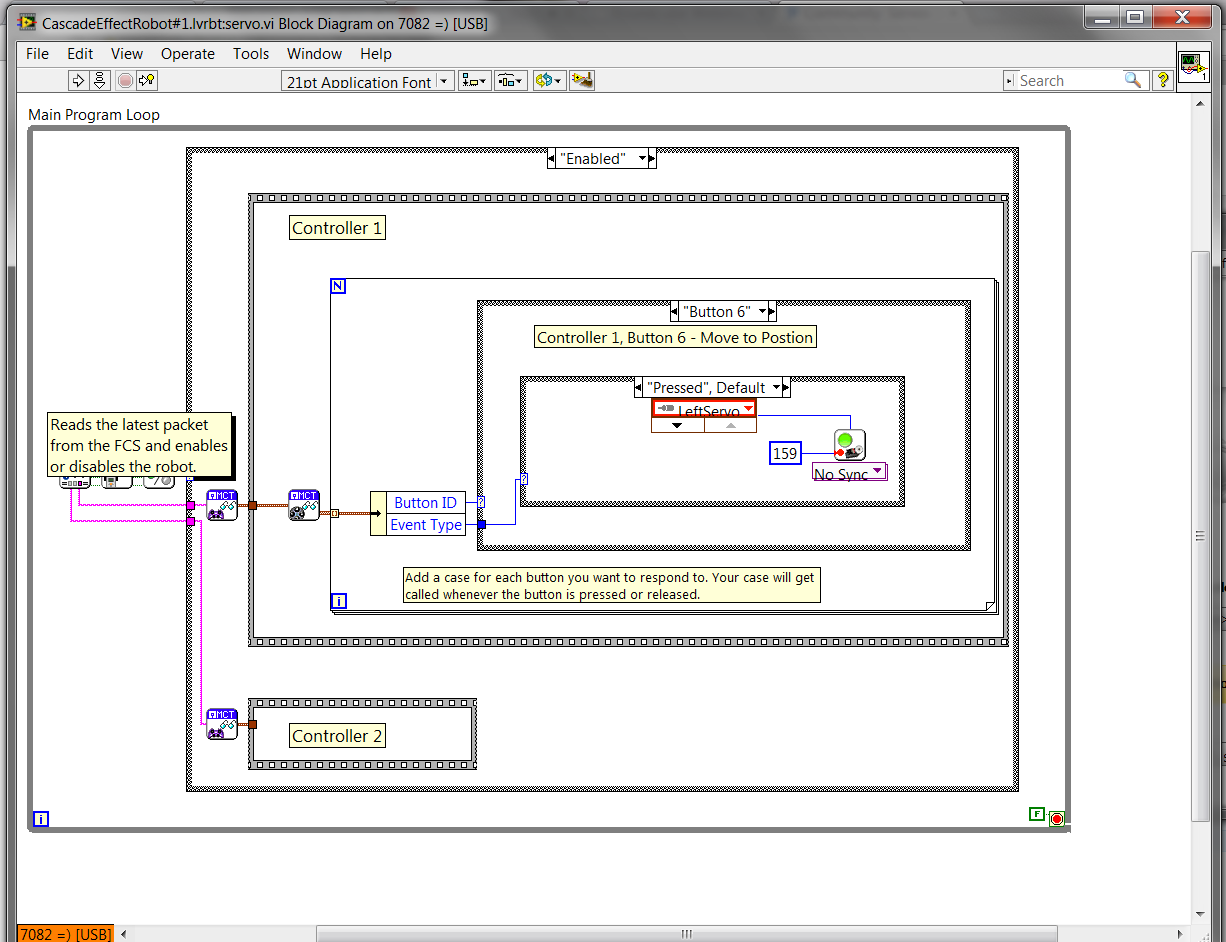
And thats the code generated for the servo.